 |
Jopnal Engine
alpha 0.4
Simple Component Based 2D/3D Game Engine
|
#include <RigidBody.hpp>
Classes | |
| class | ConstructInfo |
Public Types | |
| enum | Type { Type::Static, Type::Dynamic, Type::Kinematic, Type::StaticSensor, Type::KinematicSensor } |
Public Member Functions | |
| RigidBody (Object &object, World &world, const ConstructInfo &info) | |
| Constructor. More... | |
| virtual | ~RigidBody () override |
| Destructor. More... | |
| RigidBody & | setGravityScale (const glm::vec3 &acceleration) |
| Set gravity to the rigid body object. More... | |
| glm::vec3 | getGravityScale () const |
| Get the gravity. More... | |
| RigidBody & | setFixedMovement (const glm::bvec3 &fixed) |
| Sets the linear factor for rigid body. More... | |
| glm::bvec3 | hasFixedMovement () const |
| Check if the movement is fixed. More... | |
| RigidBody & | setFixedRotation (const glm::bvec3 &axis) |
| Sets/unsets the body to constantly rotate. More... | |
| glm::bvec3 | hasFixedRotation () const |
| Check if the rotation is fixed. More... | |
| RigidBody & | applyForce (const glm::vec3 &force, const glm::vec3 &rel_pos) |
| Applies constant force to rigid bodies relative position. More... | |
| RigidBody & | applyImpulse (const glm::vec3 &impulse, const glm::vec3 &rel_pos) |
| Applies an impulse to rigid bodies relative position. More... | |
| RigidBody & | applyTorque (const glm::vec3 &torque) |
| Applies torque to the rigid body. More... | |
| RigidBody & | applyTorqueImpulse (const glm::vec3 &torque) |
| Applies torque impulse to the rigid body. More... | |
| RigidBody & | setLinearVelocity (const glm::vec3 &linearVelocity) |
| Sets linear velocity to the rigid body. More... | |
| glm::vec3 | getLinearVelocity () const |
| Get the linear (movement) velocity. More... | |
| RigidBody & | setAngularVelocity (const glm::vec3 &angularVelocity) |
| Sets angular velocity to the rigid body. More... | |
| glm::vec3 | getAngularVelocity () const |
| Get the angular (rotational) velocity. More... | |
| RigidBody & | applyCentralForce (const glm::vec3 &force) |
| Applies force to the rigid body's center. More... | |
| RigidBody & | applyCentralImpulse (const glm::vec3 &impulse) |
| Applies impulse to the rigid body's center. More... | |
| RigidBody & | clearForces () |
| Clear all the forces affecting this body. More... | |
| std::pair< glm::vec3, glm::vec3 > | getLocalBounds () const |
| Get the local bounds of this body. More... | |
| RigidBody & | synchronizeTransform () |
| Sets the RigidBody position to be same as the objects' transform. More... | |
| template<typename T > | |
| T * | getJoint (unsigned int id=0) |
| Returns a pointer to a joint on the RigidBody whence called from. More... | |
| template<typename T > | |
| bool | breakJoint (RigidBody &other, unsigned int IDthis=0, unsigned int IDother=0) |
| Breaks a joint from the RigidBody whence called from. More... | |
| template<typename T , typename... Args> | |
| T & | link (RigidBody &body, Args &&...args) |
| Creates a joint between this RigidBody and another RigidBody. More... | |
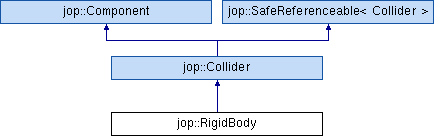
 Public Member Functions inherited from jop::Collider Public Member Functions inherited from jop::Collider | |
| bool | checkOverlap (const Collider &other) const |
| Check if this collider overlaps with another. More... | |
| bool | checkContact (const Collider &other) const |
| Check if this collider is in contact with another. More... | |
| bool | checkRay (const glm::vec3 &start, const glm::vec3 &ray) const |
| Check if a ray pierces this collider. More... | |
| void | registerListener (ContactListener &listener) |
| Register a listener for this collider. More... | |
| World & | getWorld () |
| Get the world this collider belongs to. More... | |
| const World & | getWorld () const |
| Get the world this collider belongs to. More... | |
| void | detachFromWorld () |
| Detach this body from its world. More... | |
| void | attachToWorld () |
| Attach this body to its world if it was previously detached. More... | |
| bool | isDetachedFromWorld () const |
| Check if this body is currently detached from its world. More... | |
| void | updateWorldBounds () |
| Force update of the world space bounds. More... | |
| void | setCollisionShape (CollisionShape &shape) |
| Set the collision shape. More... | |
| const CollisionShape * | getCollisionShape () const |
| Get the collision shape. More... | |
| Public Member Functions inherited from jop::Component | |
| virtual | ~Component ()=0 |
| Virtual destructor. More... | |
| Message::Result | sendMessage (const Message &message) |
| Send a message to this component. More... | |
| uint32 | getID () const |
| Get the identifier. More... | |
| void | setID (const uint32 ID) |
| Set the identifier. More... | |
| WeakReference< Object > | getObject () |
| Get the object this component is bound to. More... | |
| WeakReference< const Object > | getObject () const |
| Get the object this component is bound to. More... | |
| bool | isActive () const |
| Check if this component is active. More... | |
| void | removeSelf () |
| Remove this component from its object. More... | |
| Public Member Functions inherited from jop::SafeReferenceable< Collider > | |
| WeakReference< Collider > | getReference () const |
| Get a weak reference to the bound object. More... | |
Protected Member Functions | |
| Message::Result | receiveMessage (const Message &message) override |
| Receive a message. More... | |
| Protected Member Functions inherited from jop::Collider | |
| Collider (Object &object, World &world, const uint32 ID) | |
| Constructor. More... | |
| Collider (const Collider &other, Object &newObj) | |
| Copy constructor. More... | |
| virtual | ~Collider () override=0 |
| Virtual destructor. More... | |
| void | update (const float deltaTime) override |
| Update. More... | |
| void | setAllowSleep (const bool allow) |
| Set whether the collider is allowed to sleep. More... | |
| bool | isSleepAllowed () const |
| Check if sleep is allowed. More... | |
| Protected Member Functions inherited from jop::Component | |
| Component (Object &object, const uint32 ID) | |
| Constructor. More... | |
| Component (const Component &other, Object &newObj) | |
| Copy constructor. More... | |
| Protected Member Functions inherited from jop::SafeReferenceable< Collider > | |
| SafeReferenceable (Collider *ref) | |
| Constructor. More... | |
| SafeReferenceable (SafeReferenceable< Collider > &&other) | |
| Move constructor. More... | |
| SafeReferenceable & | operator= (SafeReferenceable< Collider > &&other) |
| Move assignment operator. More... | |
| ~SafeReferenceable () | |
| Protected destructor. More... | |
Protected Attributes | |
| std::unique_ptr< detail::MotionState > | m_motionState |
| The motion state. More... | |
| const Type | m_type |
| The body type. More... | |
| const float | m_mass |
| The mass. More... | |
| btRigidBody * | m_rigidBody |
| Pointer to derived rigid body pointer for convenience. More... | |
| std::unordered_set< std::shared_ptr< Joint > > | m_joints |
| Joints. More... | |
| Protected Attributes inherited from jop::Collider | |
| std::unique_ptr< btCollisionObject > | m_body |
| Body data. More... | |
| World & | m_worldRef |
| Reference to the world. More... | |
| std::set< ContactListener * > | m_listeners |
| Listeners registered for this collider. More... | |
| bool | m_detached |
| Is this body detached from the world? More... | |
| bool | m_allowSleep |
| Is sleep allowed? More... | |
Friends | |
| class | Joint |
Definition at line 44 of file RigidBody.hpp.
|
strong |
Rigid body type
| Enumerator | |
|---|---|
| Static |
Non-moving body. |
| Dynamic |
Moving body. |
| Kinematic |
User-animated body. |
| StaticSensor |
Non-moving. |
| KinematicSensor |
User-animated. |
Definition at line 56 of file RigidBody.hpp.
| jop::RigidBody::RigidBody | ( | Object & | object, |
| World & | world, | ||
| const ConstructInfo & | info | ||
| ) |
Constructor.
| object | Reference to the object |
| world | The physics world |
| info | Construction info |
|
overridevirtual |
Destructor.
| RigidBody& jop::RigidBody::applyCentralForce | ( | const glm::vec3 & | force | ) |
Applies force to the rigid body's center.
| force | Amount and direction of the applied force |
| RigidBody& jop::RigidBody::applyCentralImpulse | ( | const glm::vec3 & | impulse | ) |
Applies impulse to the rigid body's center.
| impulse | Amount and direction of the applies impulse |
| RigidBody& jop::RigidBody::applyForce | ( | const glm::vec3 & | force, |
| const glm::vec3 & | rel_pos | ||
| ) |
Applies constant force to rigid bodies relative position.
| force | Amount and direction of the force |
| rel_pos | Vector for the relative position on rigid body that the force applies on |
| RigidBody& jop::RigidBody::applyImpulse | ( | const glm::vec3 & | impulse, |
| const glm::vec3 & | rel_pos | ||
| ) |
Applies an impulse to rigid bodies relative position.
| impulse | Amount and direction of the impulse |
| rel_pos | Vector for the relative position on rigid body that the impulse applies on |
| RigidBody& jop::RigidBody::applyTorque | ( | const glm::vec3 & | torque | ) |
Applies torque to the rigid body.
| torque | Amount and direction as vector of the applied torque |
| RigidBody& jop::RigidBody::applyTorqueImpulse | ( | const glm::vec3 & | torque | ) |
Applies torque impulse to the rigid body.
| torque | Amount and direction as vector of the applied torque |
| bool jop::RigidBody::breakJoint | ( | RigidBody & | other, |
| unsigned int | IDthis = 0, |
||
| unsigned int | IDother = 0 |
||
| ) |
| RigidBody& jop::RigidBody::clearForces | ( | ) |
Clear all the forces affecting this body.
| glm::vec3 jop::RigidBody::getAngularVelocity | ( | ) | const |
Get the angular (rotational) velocity.
| glm::vec3 jop::RigidBody::getGravityScale | ( | ) | const |
Get the gravity.
| T* jop::RigidBody::getJoint | ( | unsigned int | id = 0 | ) |
| glm::vec3 jop::RigidBody::getLinearVelocity | ( | ) | const |
Get the linear (movement) velocity.
| std::pair<glm::vec3, glm::vec3> jop::RigidBody::getLocalBounds | ( | ) | const |
Get the local bounds of this body.
| glm::bvec3 jop::RigidBody::hasFixedMovement | ( | ) | const |
Check if the movement is fixed.
| glm::bvec3 jop::RigidBody::hasFixedRotation | ( | ) | const |
Check if the rotation is fixed.
| T& jop::RigidBody::link | ( | RigidBody & | body, |
| Args &&... | args | ||
| ) |
Creates a joint between this RigidBody and another RigidBody.
T is the type of the joint to create. Applicable joints are derived from Joint.
| body | The other body to link with |
| args | The arguments to pass to the joint's constructor |
|
overrideprotectedvirtual |
Receive a message.
Override this to handle messages sent to this. Don't forget to call the base class' method as well to ensure that the message gets forwarded correctly.
| message | The message |
Reimplemented from jop::Component.
| RigidBody& jop::RigidBody::setAngularVelocity | ( | const glm::vec3 & | angularVelocity | ) |
Sets angular velocity to the rigid body.
| angularVelocity | Amount and direction of the angular velocity |
| RigidBody& jop::RigidBody::setFixedMovement | ( | const glm::bvec3 & | fixed | ) |
Sets the linear factor for rigid body.
| fixed | Axes to disable movement |
| RigidBody& jop::RigidBody::setFixedRotation | ( | const glm::bvec3 & | axis | ) |
Sets/unsets the body to constantly rotate.
| axis | Axes to disable rotations |
| RigidBody& jop::RigidBody::setGravityScale | ( | const glm::vec3 & | acceleration | ) |
Set gravity to the rigid body object.
| acceleration | Amount of the gravity to be applied as vector |
| RigidBody& jop::RigidBody::setLinearVelocity | ( | const glm::vec3 & | linearVelocity | ) |
Sets linear velocity to the rigid body.
| linearVelocity | Amount and direction of the linear velocity |
| RigidBody& jop::RigidBody::synchronizeTransform | ( | ) |
Sets the RigidBody position to be same as the objects' transform.
|
friend |
Definition at line 50 of file RigidBody.hpp.
|
protected |
Joints.
Definition at line 317 of file RigidBody.hpp.
|
protected |
The mass.
Definition at line 314 of file RigidBody.hpp.
|
protected |
The motion state.
Definition at line 312 of file RigidBody.hpp.
|
protected |
Pointer to derived rigid body pointer for convenience.
Definition at line 315 of file RigidBody.hpp.
|
protected |
The body type.
Definition at line 313 of file RigidBody.hpp.
 1.8.11
1.8.11

